The t0.CRS
Control & Readout System

The CRS can be operated as a standalone unit or be synchronously integrated within a 16-board subrack and backplane assembly.

The CRS is a comprehensive microwave readout and control system designed to modularly scale from single-boards to deployments with hundreds of units.
Engineered for precision and reliability: whether decoding signals from the dawn of time, finding the most hidden objects in space, or harnessing the ascendent properties of quantum phenomena.
The CRS Board





Infrastructure & Connectivity
16 boards per 6U subrack
Full-mesh backplane
400 Gbps connectivity
6x GTY across the backplane
6x SFP28
1x QSFP28
Integrated Clock, Sync, and IRIG-B
Powered via 12V AC/DC adapter
Air- and water-cooled options
Direct-Sampled RF Interfaces
8x ADC (14-bit; 5 GSPS)
Up to 14.6 dBm
SFDR > 65 dBc
NSD < -145 dBm/Hz
8x DAC (14-bit ; 9.85 GSPS)
Up to 6.5 dBm
SFDR > 65 dBc
NSD < -155 dBm/Hz
Embedded Systems
Linux OS with open-source kernel
Local and network bootable
Quad-core Cortex-A53 (1.2 GHz)
Dual-core Cortex-R5F (500 MHz)
8 GB Soldered RAM (64-bit DDR4)
Expandable DDR4 SODIMM slot
M.2 non-volatile storage or PCIe expansion
Removable SD card
Industry Standard I/O Interfaces
1G Ethernet
3x SMA I/O
8x SMP I/O
84x high speed LVDS I/O
JTAG over micro-USB
OLED front panel display
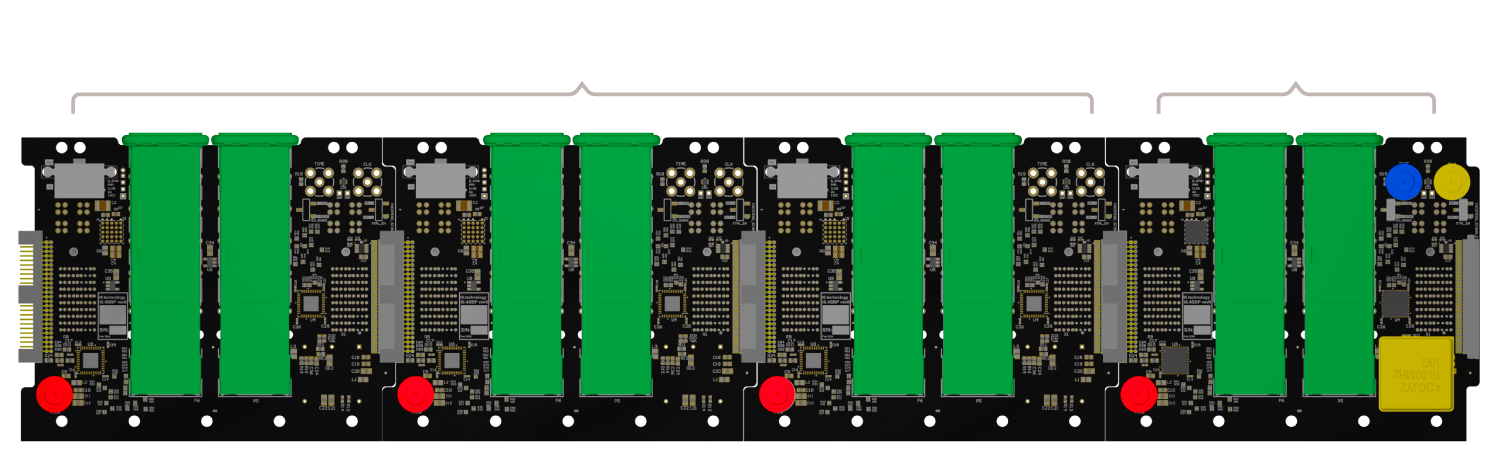
The CRS Backplane
The backplane assembly is composed of 4 segments, each addressing 4 CRS boards.
Each segment includes an auxiliary SMA and 3x QSFP28 links (via double-high zQSFP28 cages) for patching 100 Gbps links between segments for a full all-to-all mesh.
The controller segment distributes an ultra-low phase noise clock and IRIG input.
IRIG (GPS)
An input SMA accepts IRIG from a GPS receiver and distributes it to all 16 CRS boards.
Sync
An auxiliary SMA is shared among the boards within each segment.
This can be user-defined to emit or receive synchronization signals from external equipment.
Data Shuffle
Level 1 Shuffle:
Every CRS board has 3x25 Gbps links in the substrate, one to each other board in the segment.
Level 2 Shuffle:
Each CRS board also has 3x25 Gbps links routed to three QSFP28 interfaces on the segment (shown in green), for a total of 300 Gbps. These 100 Gbps links can then be patched to the other segments for a fully internal level-2 shuffle, to a subset of the segments, or to an external switch.
Clocking
An ultra-stable oven-controlled oscillator (OCXO) provides a common 10 MHz low-phase-noise clock to all CRS boards.
Bi-directional SMA either outputs that 10 MHz clock to drive external equipment, or can be used as an input to distribute an external 10 MHz source rather than the OCXO.
Signal Processing
Microwave Control Firmware
The rfmux microwave control firmware is designed to operate high-performance superconducting devices and quantum sensors
Direct RF synthesis and digitization up to 10 GHz
2.5 GHz of instantaneous bandwidth
Multiplexed control and readout of 4,096 independent frequency channels
Continuous multichannel streaming (I,Q) with up to 2.44 MHz of complex bandwidth per channel
Active feedback to modify individual control tones according to demodulated output
Built-in Spectrum Analyzer and Vector Network Analyzer modes
Compatible with
hidfmux, a deployment-scale control software suite for Kinetic Inductance Devices by third party researches and used on the South Pole Telescope
Radio Correlator Platform
Designed to interface with the Kotekan GPU X-Engine that is being used for the Canadian Hydrogen Observatory and Radio-transient Detector (CHORD) and CHIME
[Coming soon] on-board FFT beam-former for RFI monitoring
Open Source Firmware Compatability
[Coming soon] Compatibility with open-source CASPER framework for radio astronomy
[Coming soon] Compatibility with open-source QICK framework for qubit control
Open Software Stack
Fully-featured embedded Linux operating system and development environment with open-source kernel
Open-source board support package using Buildroot
Open-source
rfmuxPython and C++ API and librariesOnboard JupyterLab instance with pre-installed libraries